What is the most efficient way to collect tons of logs in a forest close to the arctic circle takes around ten years of experience to answer. Could we show people different alternatives and let them take the last decision in order to help unexperienced drivers to perform much better much faster? Could we help reveal the secret of what is the best log to pick up next?
Introduction
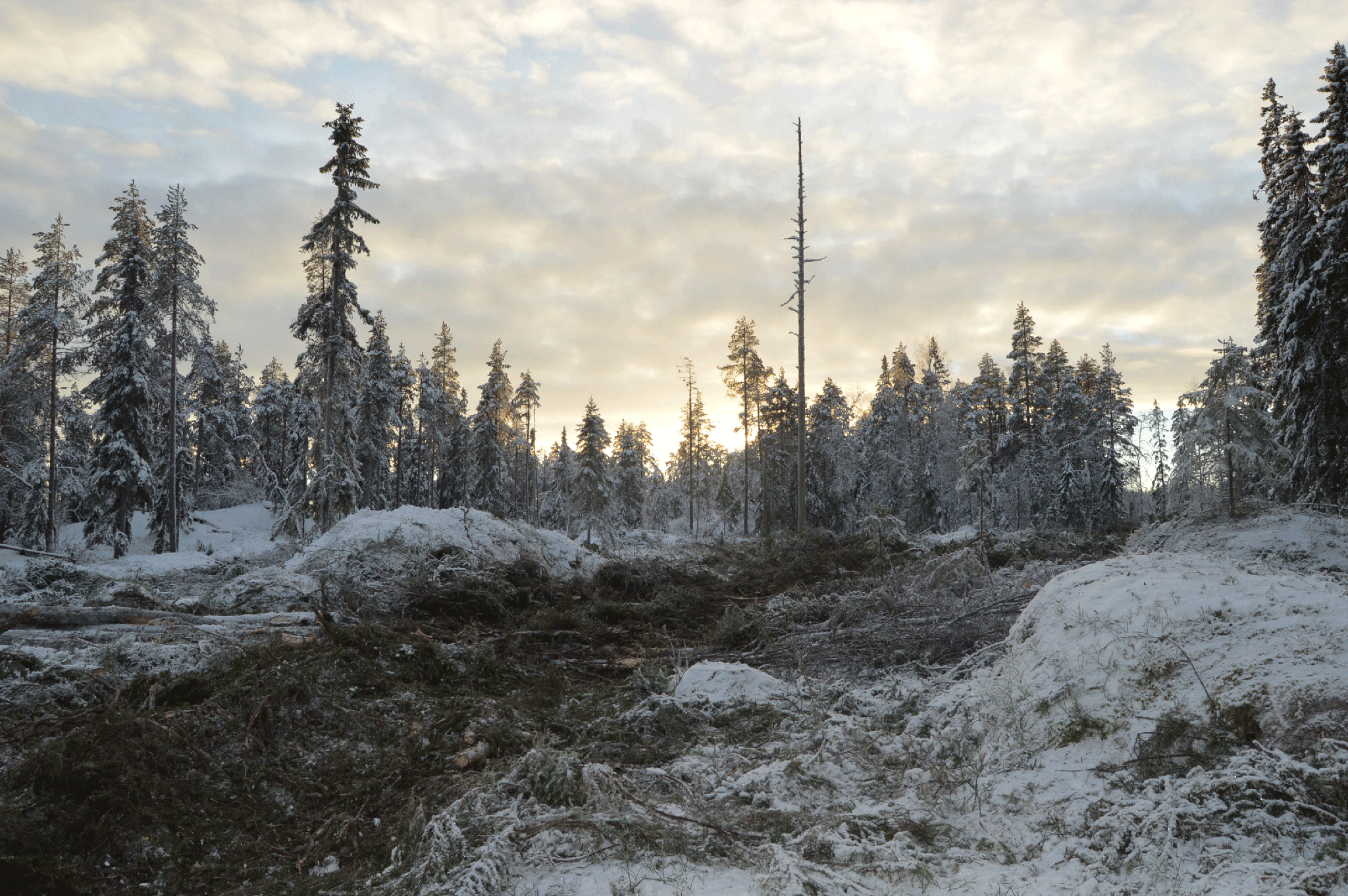
Swedish forest landscape after forwarding
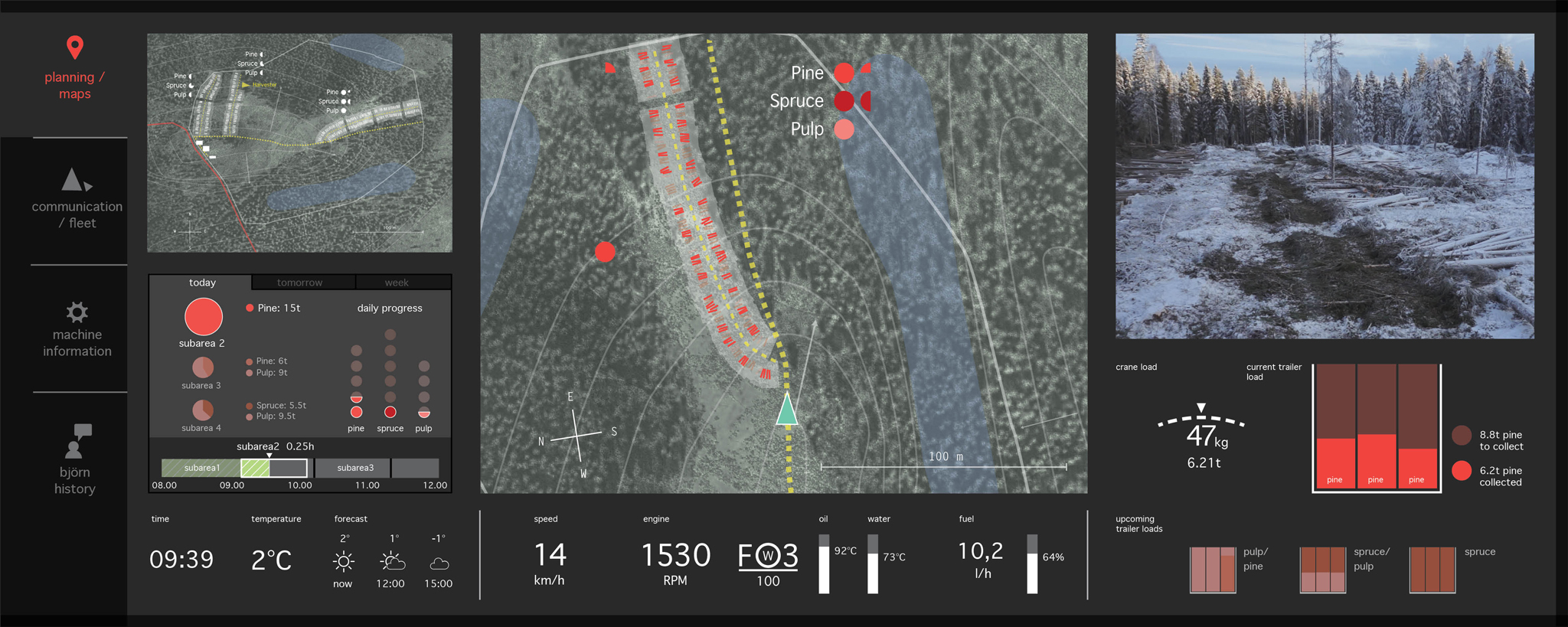
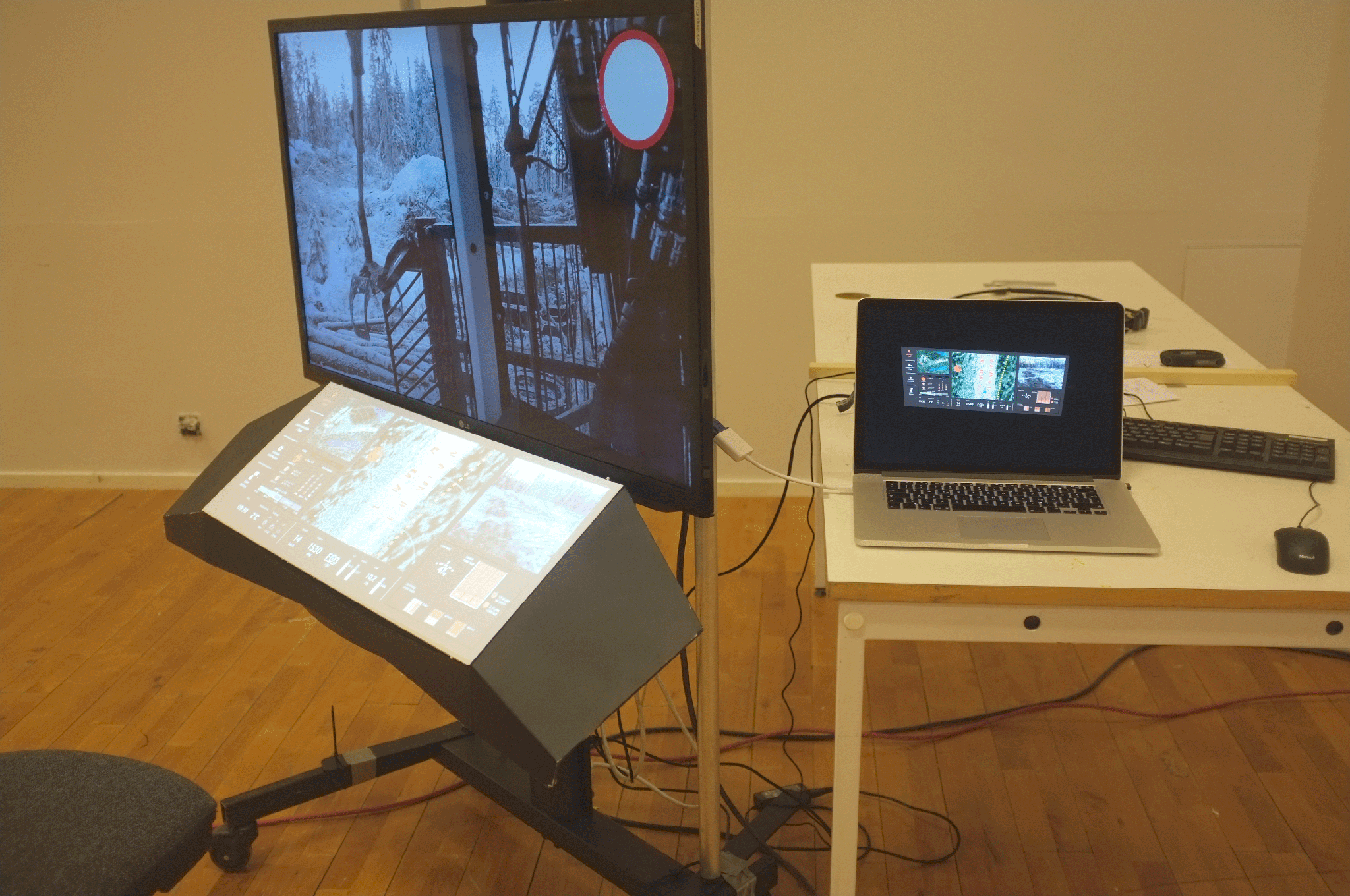
The dashboard information system interface
Can we make it easier for ‘forwarder’ students to learn and for unexperienced drivers to perform better?
As part of UID assignment “Professional use” we were asked to come up with a concept for navigating the forwarder for the year 2020. What follows is a summary of our approach: the interface for an information system that would improve the productivity of the tasks thanks to make them much easier to understand. The basic idea is to show visually all the variables that until now had to be considered in the mind of only experienced drivers.
One of the main features of the system is that it makes it easier for students to learn and for unexperienced drivers to perform better much faster.
Concept video
Research
The research about technology was aimed at finding a solid ground for our future ideas and more specifically to understand the complexity of the problem we are dealing with.

Clustering research results
Reformulated brief
A navigation system that supports the forwarder driver to plan and navigate his route when collecting and sorting logs.This system provides information about the surroundings and task. This system provides information about the surroundings and task management in order to help the driver navigate the most beneficial workflow without decreasing their space for decision making and sense of freedom.
From our first interviews to operators, drivers enjoy working in Nature
User enquiry
We went to Överklinten in Robertsfors and met with test driver’s for Komatsu. Our conclusion from our in depth interviews were:
we interviewed students and teachers at a forestry driver education
- Planning is crucial to a profitable harvesting of the forest and is often made in a team before the harvesting of the forest starts.
- The initial planning makes a big difference for the drivers.
- The forwarder driver does a lot of mind mapping; deciding which tree and piles to collect in which order. This is a part that takes the driver many years to master.
- The drivers thought that automation of parts of the work is good if it gives the driver more time to plan ahead.

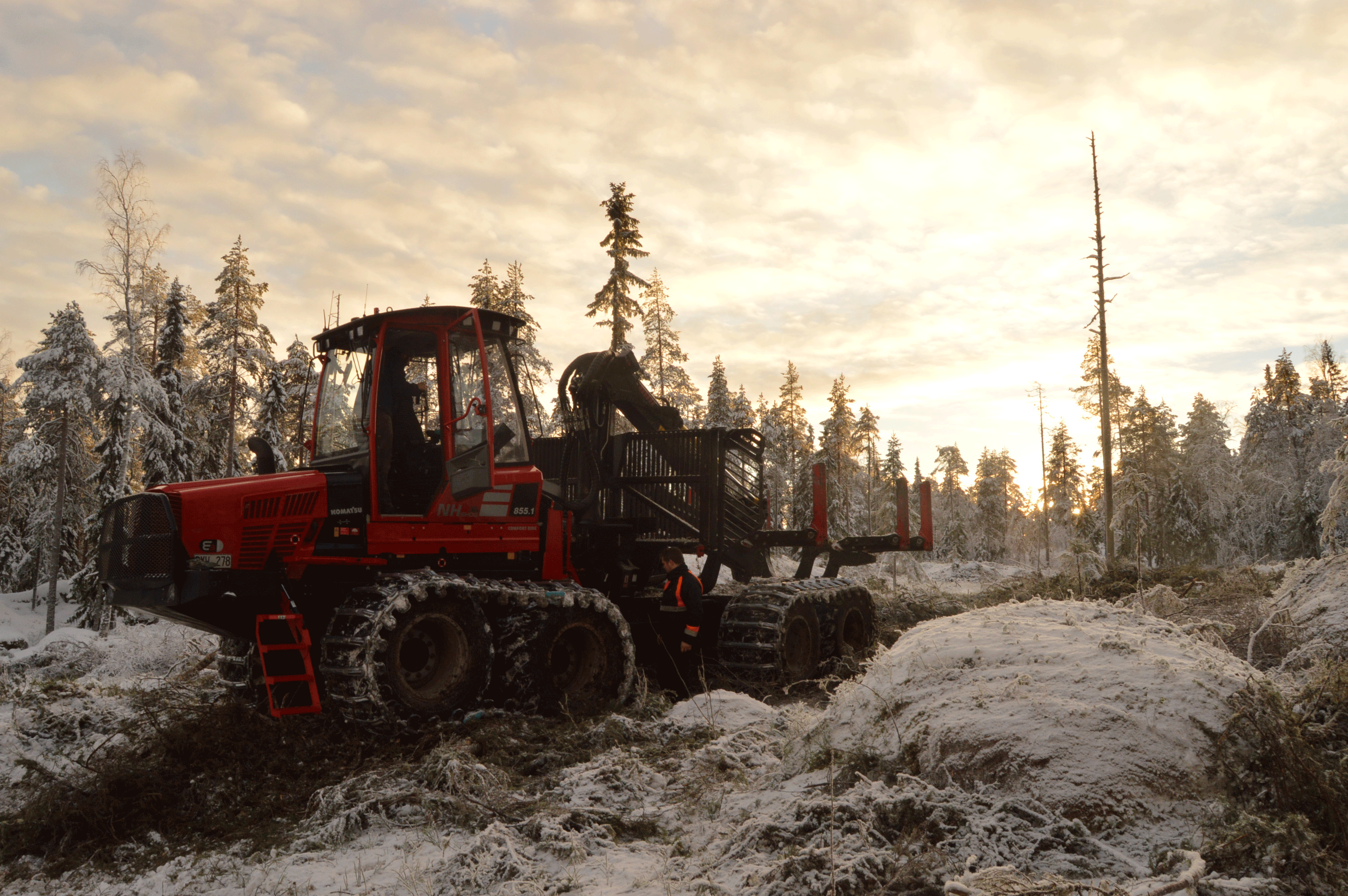
Observing the users in context
Ideation
We started the ideation process with a ‘piggy back’ idea generation session based on the five previously defined factors that influence the navigation of the forwarder. We then identified a number of strong ideas and then condensed these into clearly defined categories for further development. Moving forward, we visually mapped the stages of UI combined with the stages of the driver’s cognitive process. This was done in a way to allow for fluid movement and repositioning of ideas and scenario changes.
Ideation refinement
A Forwarder scenario sequence with logs to be picked up at the sides
Prototyping
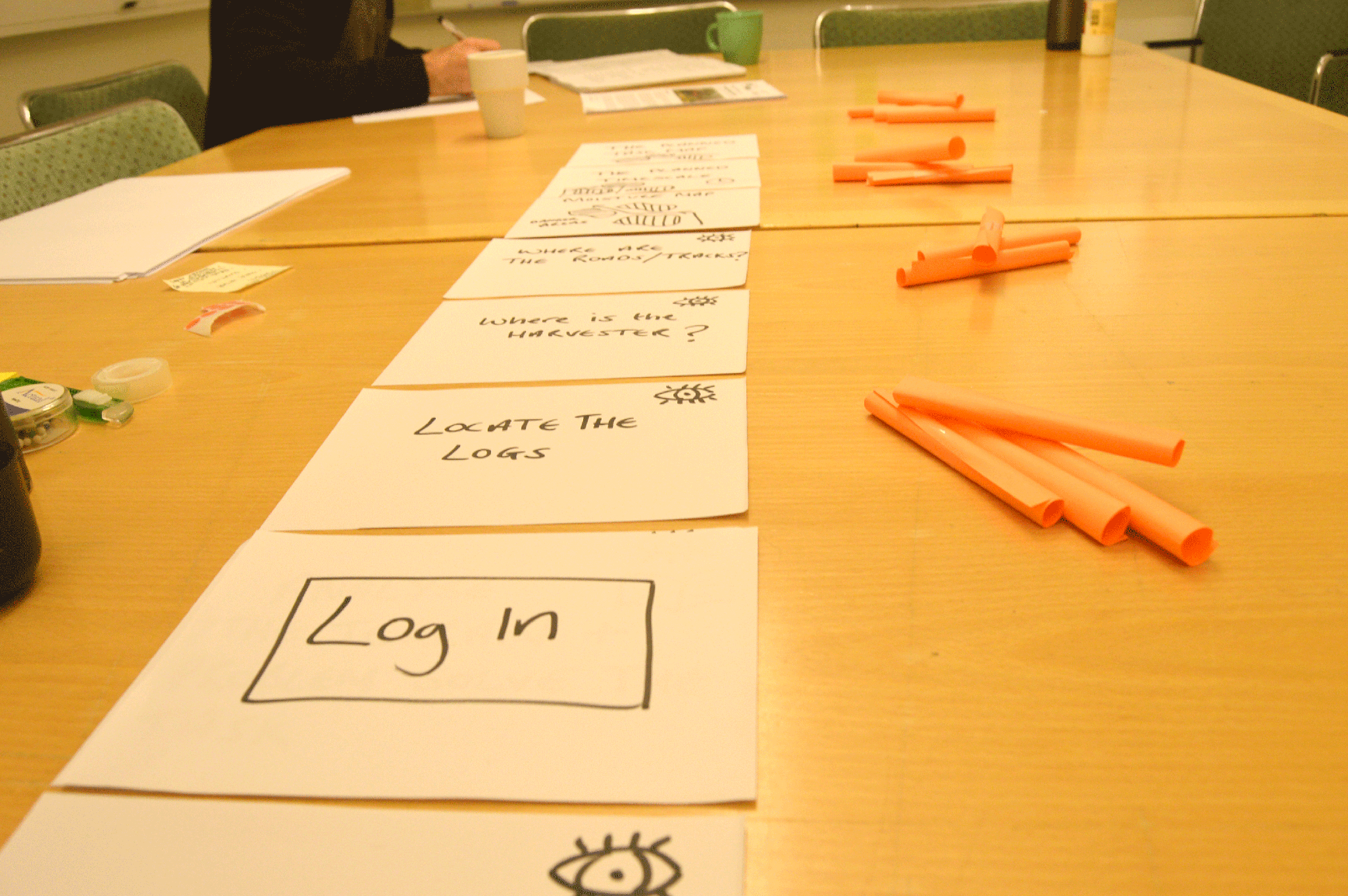
A low fidelity prototype was created to be able to get a clearer opinion of what kind of information the operators needed or would prefer to access in a future scenario. The prototype was made from 5mm thick foam-board and is a representation of the forwarder operator´s workspace – which consists of a dashboard and the windshields of the vehicle´s cabin.
Paper prototype #1
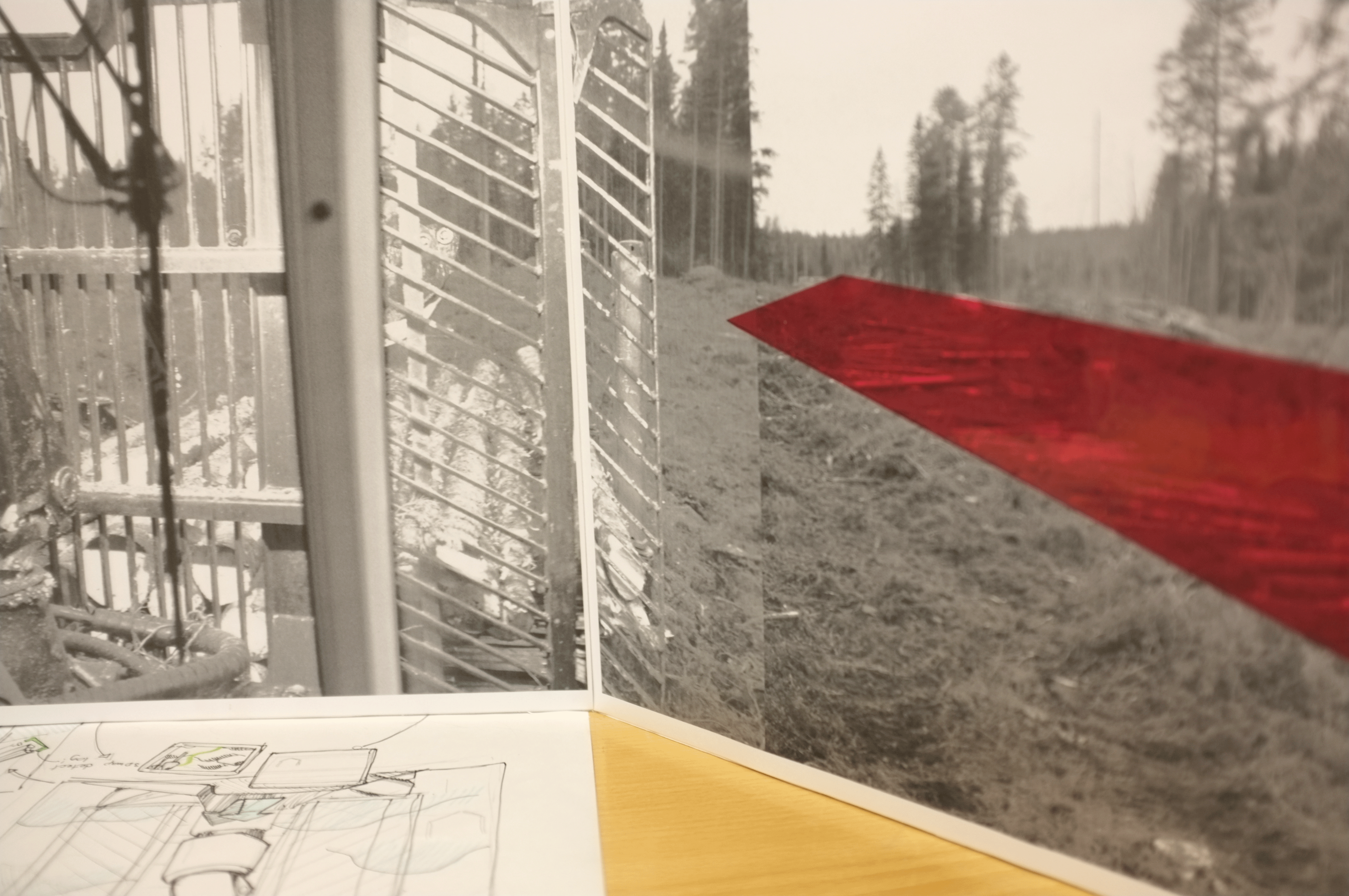
Different shapes of translucent foil could be superimposed
To simulate the surroundings the operator see when looking out of the cabin we created a 180 degree view of a typical operating situation while driving along logs to identify and pick them up using the vehicle´s crane. Different shapes of translucent foil could be superimposed on those prints to create various situations of how augmented information could be used.
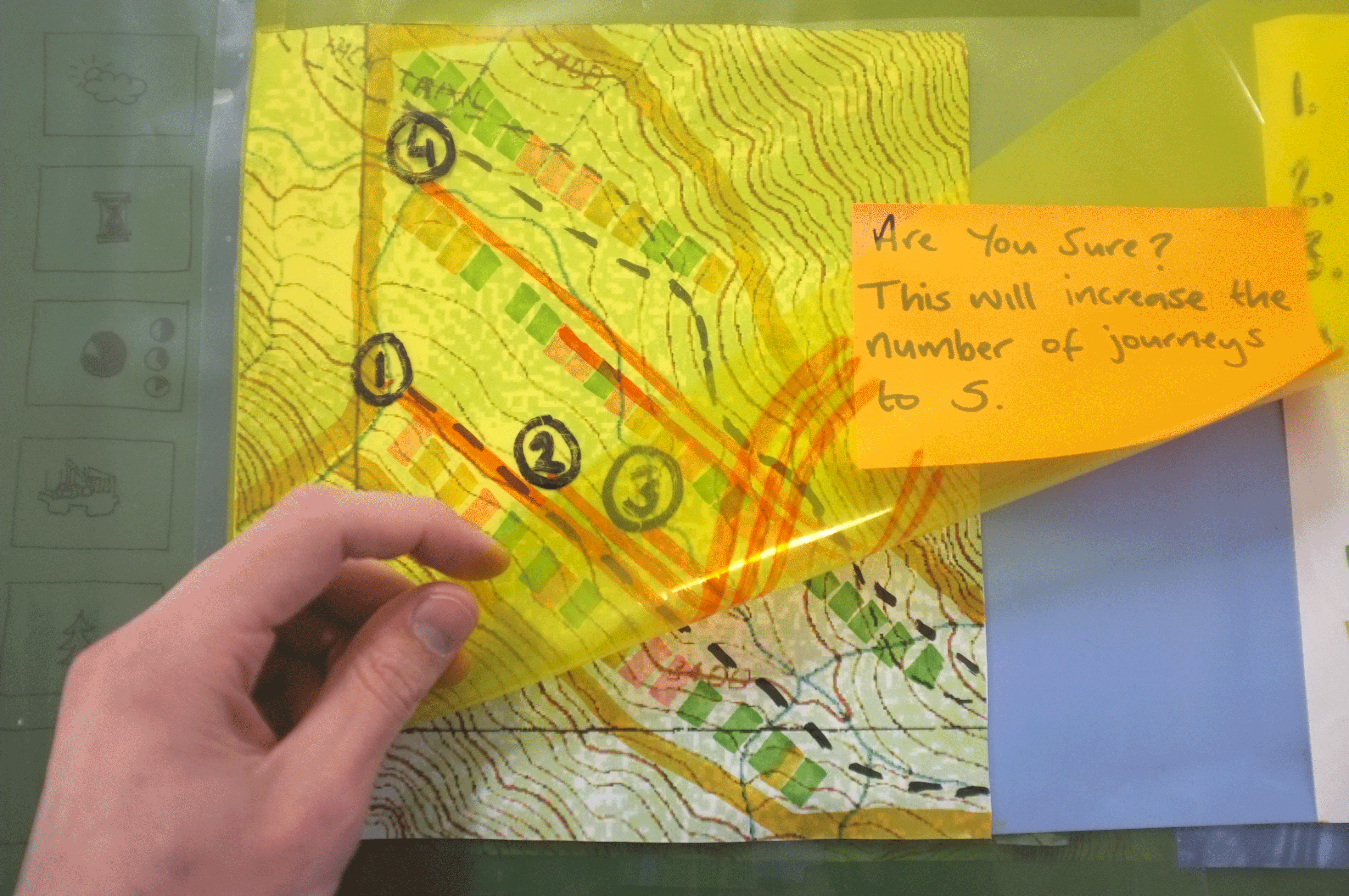
Prototype layers of information testing
Dashboard paper prototype
Storyboards & scenarios
We integrated all the feedback information in our concept and created a draft storyboard for different scenarios covering different forwarding tasks such as: planning, driving and selecting logs. We also created a first step graphic proposal for the information displayed in the Driver’s profile.

Detail of the storyboard: the screen with the harvested area divided into subareas

Detail of the storyboard: the driver inside the new forwarder cabin
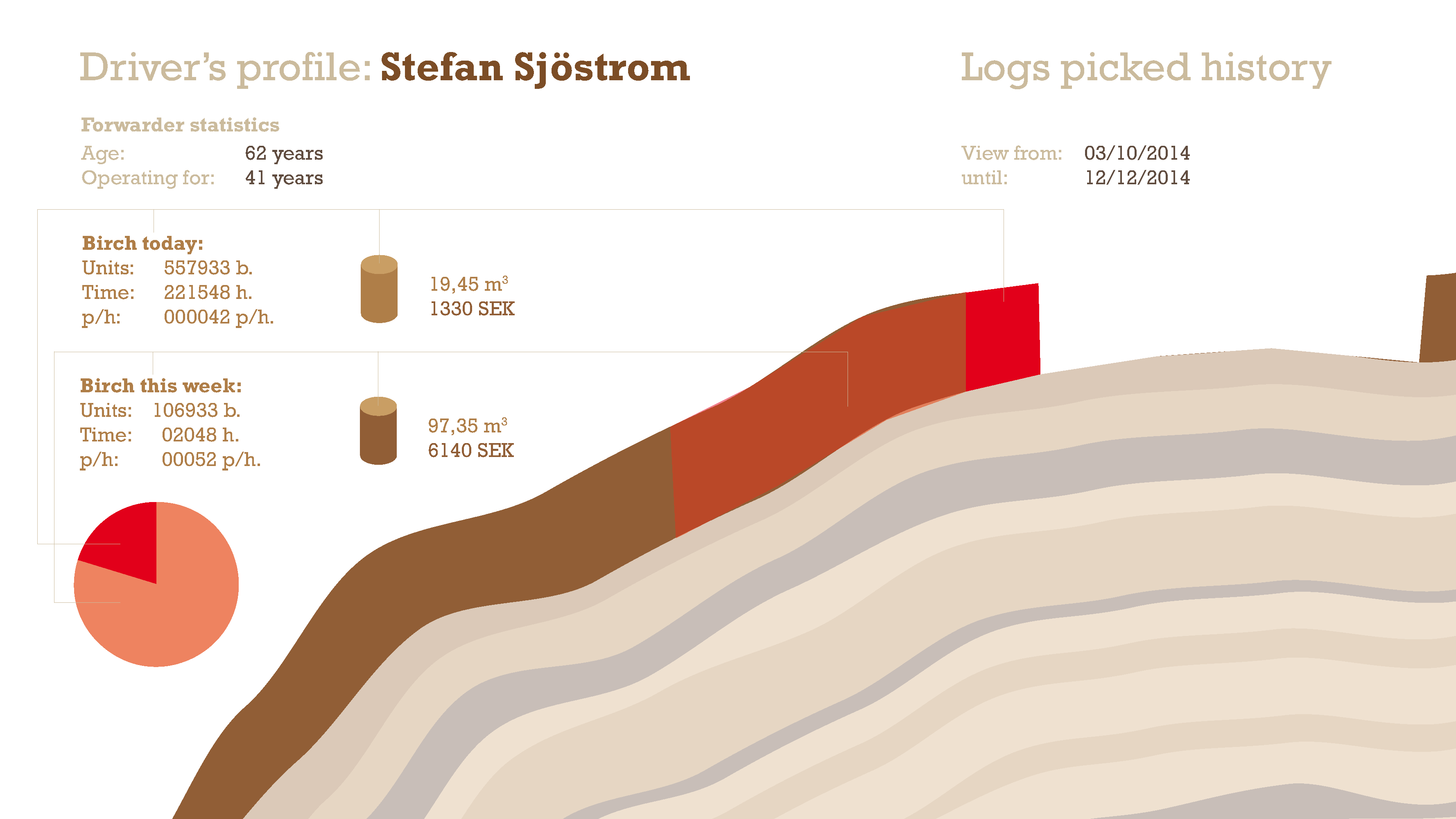
Driver’s profile sketch: detail information view
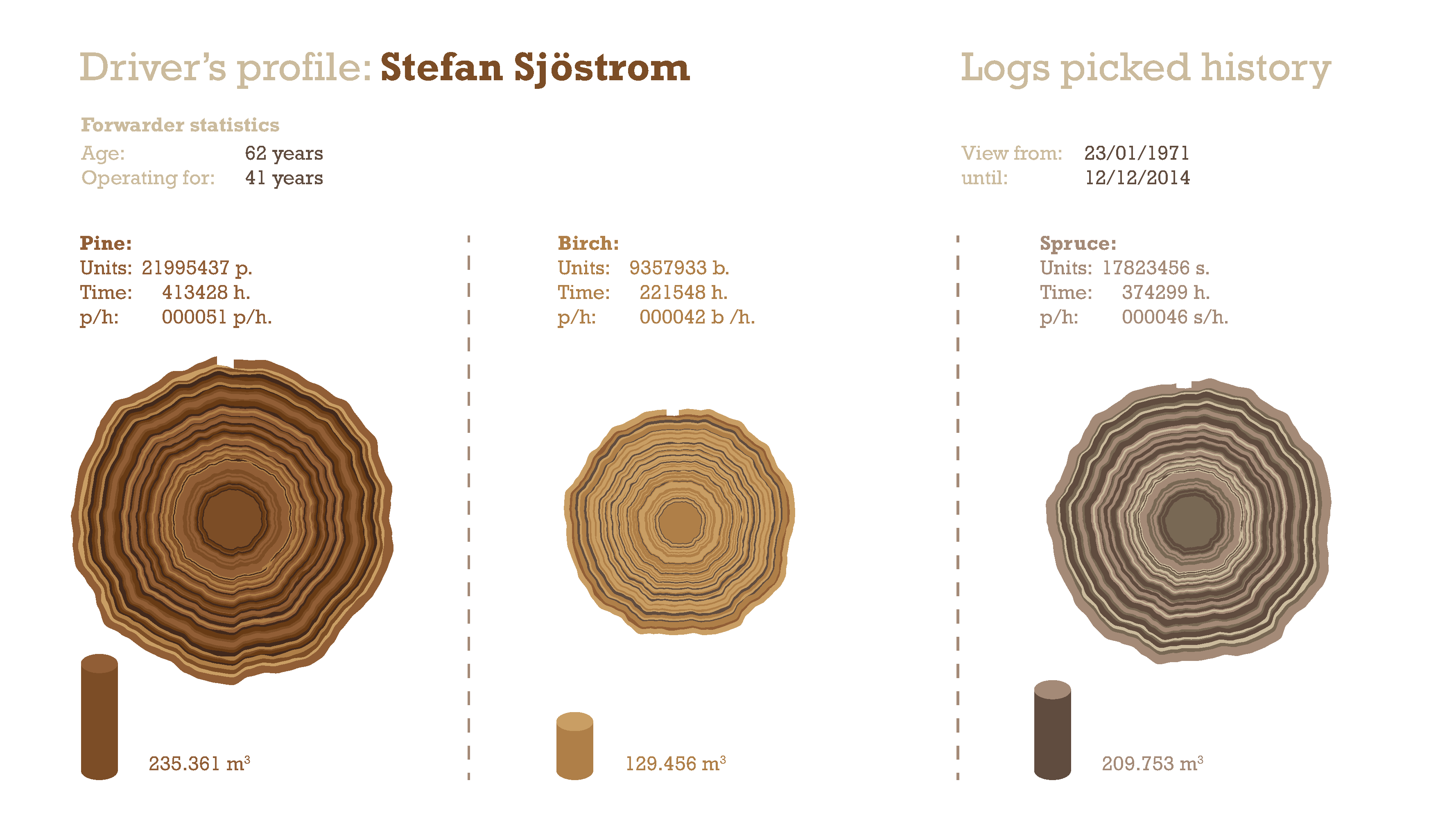
Driver’s profile sketch: general information
User testing and refinement
We travelled to the Forestry Studies School of Burträsk to test our ideas about the information system using our prototype with the students there. Our goal was to check if the information we were providing at each moment of the forwarding process was considered useful by the students (and future drivers). We interviewed three students and one teacher.

testing our concept with forestry students, teachers and drivers
Solution
Our solution provides forestry companies with an integrated system by connecting the various forestry divisions
Our solution provides forestry companies with an integrated system by connecting the various forestry divisions through the transfer and optimisation of information. As previously discussed, forestry machines are equipped with highly technical solutions allowing individual systems and vehicles to measure the information relevant to their specific task. By looking at the industry as a whole, we have devised a system where targeted information transfer would benefit the productivity of individual machine operations. As our brief specified we work within the area of navigating the Forwarder vehicle, we focused on working to reveal the information that would be of most benefit to the forwarding process, both in terms of information already gathered within the industry and the acquisition of additional information we foresee to be advantageous.
The dashboard information system interface interface
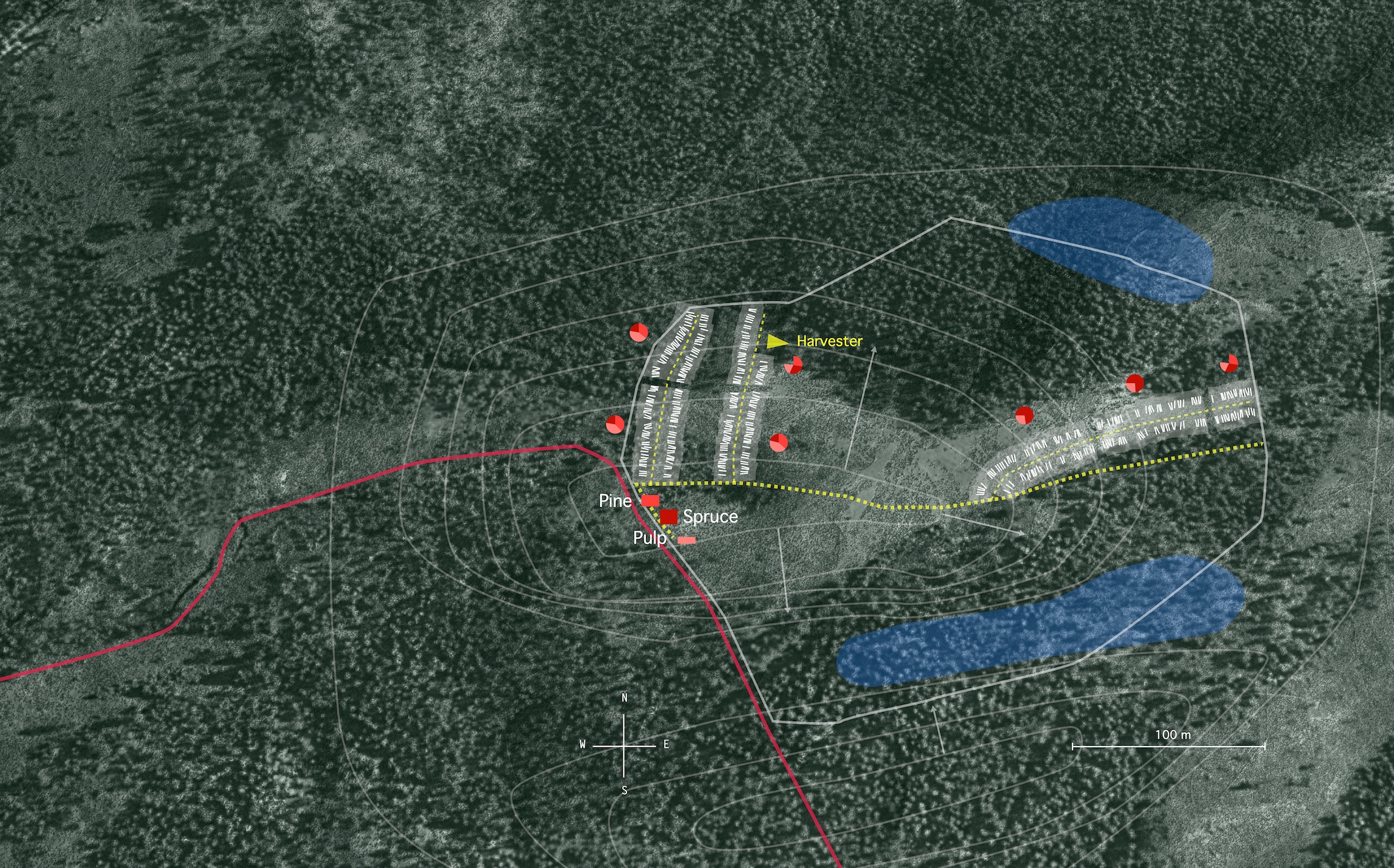
Area overview map
Subarea overview map
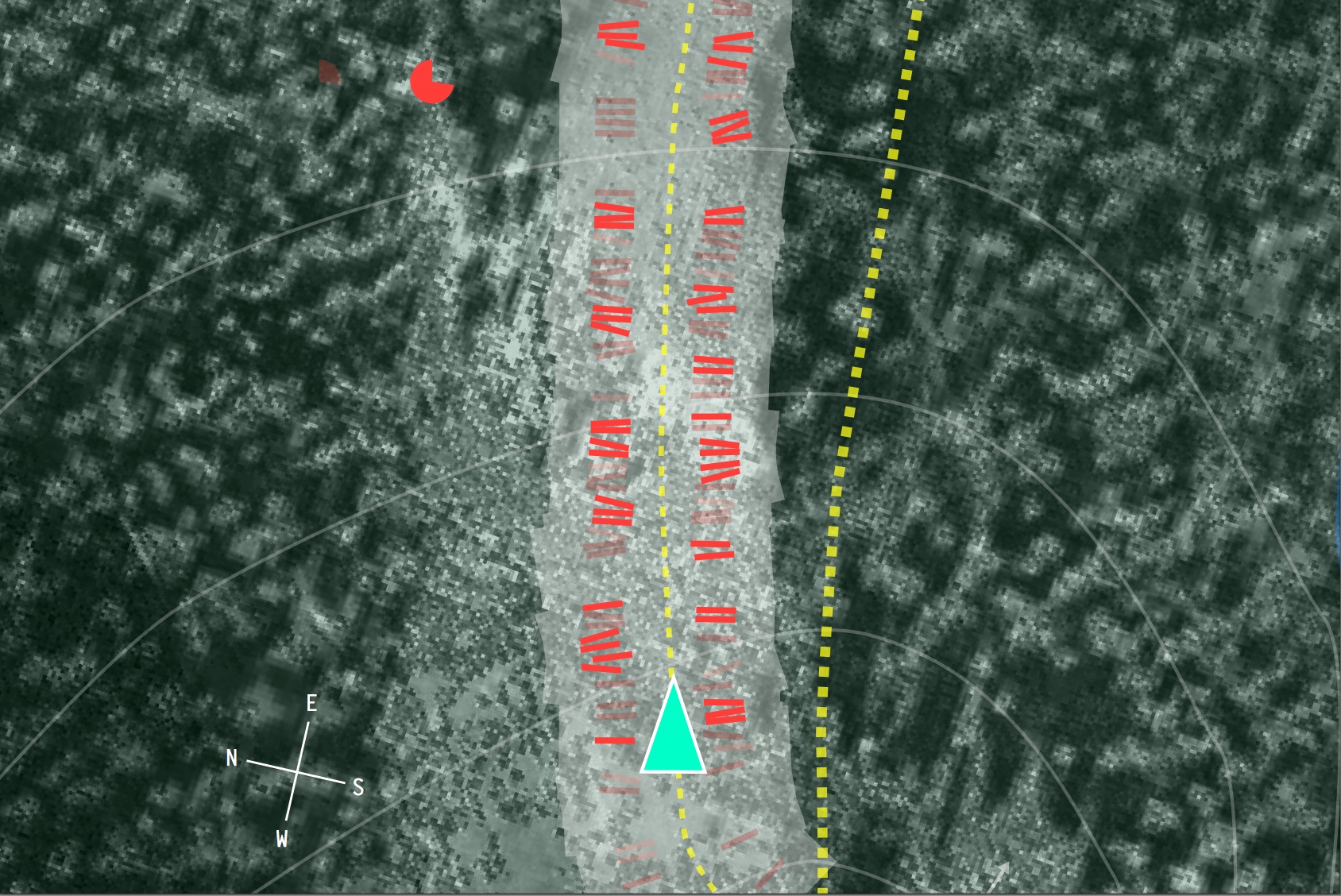
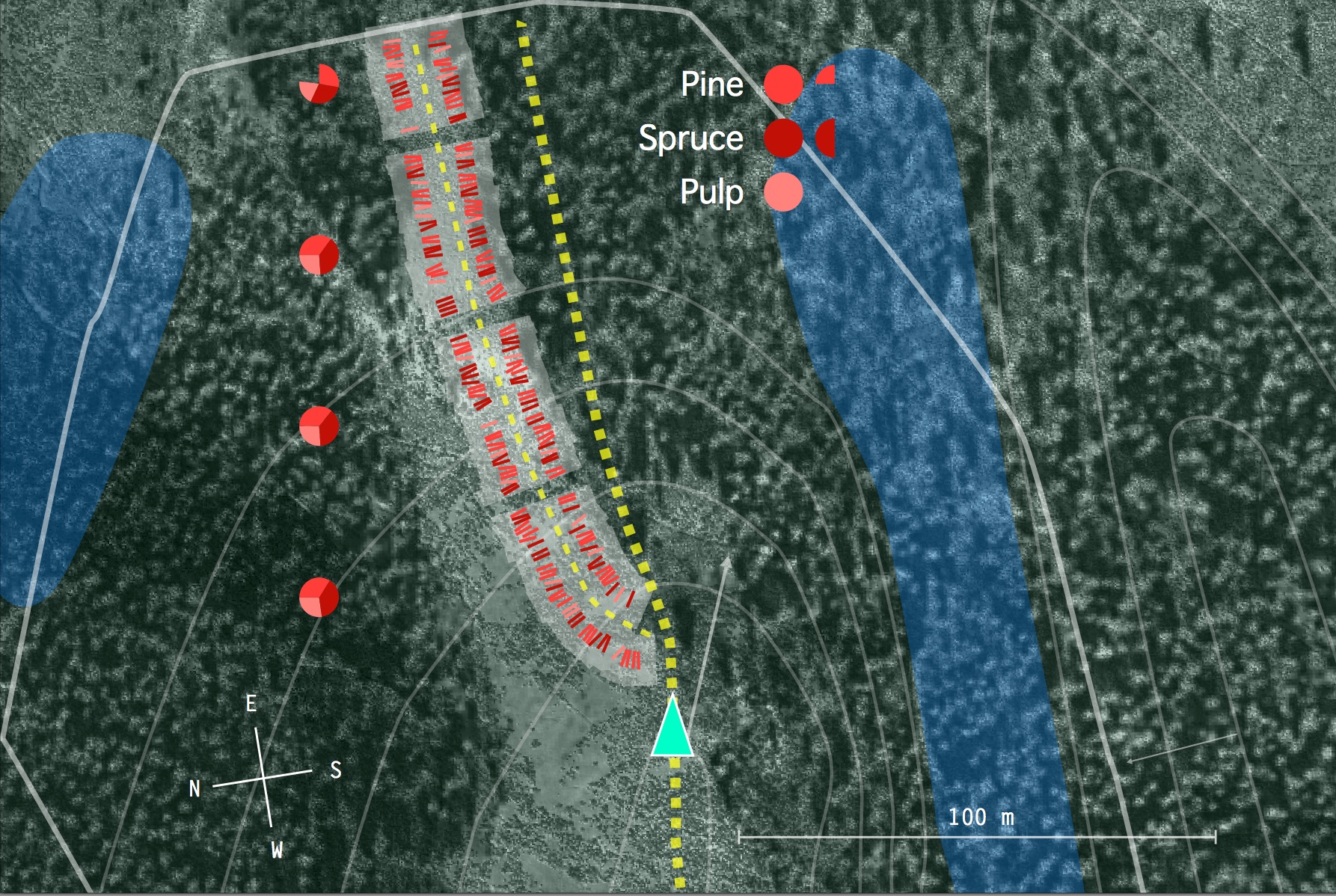
Subarea detail view map
Final prototype presentation & feedback
The system presents relevant information to the driver based on the driver’s current working situation. The system is adapting to the driver’s experience and professional level and can be customized for the drivers needs. By providing the driver with information during workflow the aim is to enable the driver to make more efficient decisions and better planning, to increase the drivers productivity. Less experienced drivers will shorten their learning process and be better at planning.
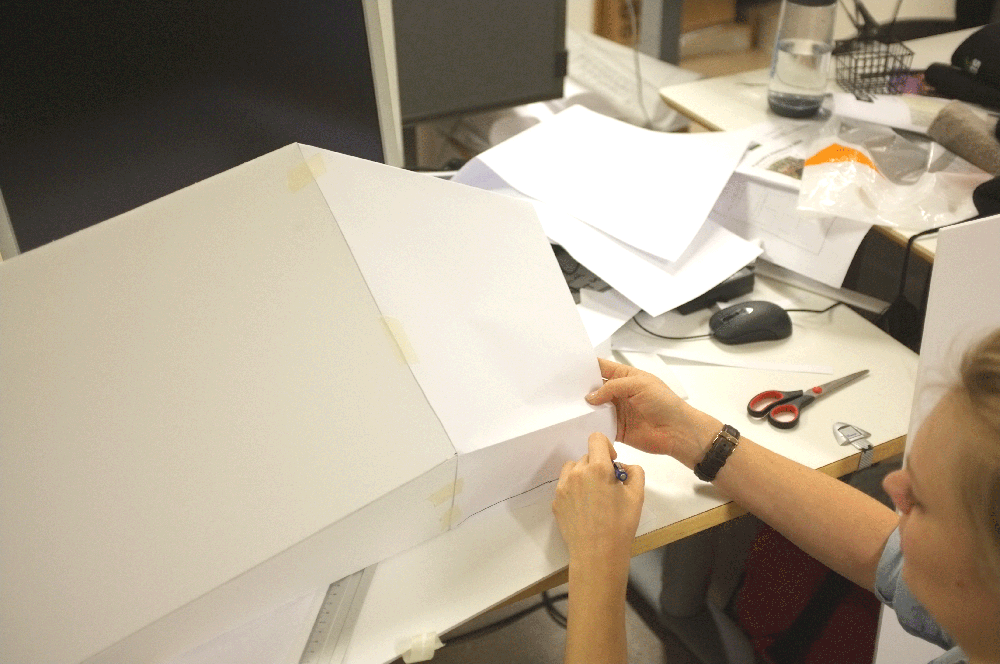
Assembly of the final prototype
Team Members:
- Isabel Andersson
- Matthias Karg
- Lauren Robertson
- Mariano Velamazán